Lecture 1: Floating-point arithmetic, vector norms¶
Syllabus¶
Week 1: floating point, vector norms, matrix multiplication
Today¶
- Fixed vs. floating point arithmetic
- Concept of backward and forward stability of algorithms
- How to measure accuracy: vector norms
Representation of numbers¶
Real numbers represent quantities: probabilities, velocities, masses, ...
It is important to know, how they are represented in the computer, which only knows about bits.
Fixed point¶
The most straightforward format for the representation of real numbers is fixed point representation, also known as Qm.n format.
A Qm.n number is in the range $[-(2^m), 2^m - 2^{-n}]$, with resolution $2^{-n}$.
Total storage is $m + n + 1$ bits.
The range of numbers represented is fixed.
Floating point¶
The numbers in computer memory are typically represented as floating point numbers
A floating point number is represented as
$$\textrm{number} = \textrm{significand} \times \textrm{base}^{\textrm{exponent}},$$
where significand is integer, base is positive integer and exponent is integer (can be negative), i.e.
$$ 1.2 = 12 \cdot 10^{-1}.$$
Fixed vs Floating¶
Q: What are the advantages/disadvantages of the fixed and floating points?
A: In most cases, they work just fine.
However, fixed point represents numbers within specified range and controls absolute accuracy.
Floating point represent numbers with relative accuracy, and is suitable for the case when numbers in the computations have varying scale (i.e., $10^{-1}$ and $10^{5}$).
In practice, if speed is of no concern, use float32 or float64.
IEEE 754¶
In modern computers, the floating point representation is controlled by IEEE 754 standard which was published in 1985 and before that point different computers behaved differently with floating point numbers.
IEEE 754 has:
- Floating point representation (as described above), $(-1)^s \times c \times b^q$.
- Two infinities, $+\infty$ and $-\infty$
- Two kinds of NaN: a quiet NaN (qNaN) and signalling NaN (sNaN)
- qNaN does not throw exception in the level of floating point unit (FPU), until you check the result of computations
- sNaN value throws exception from FPU if you use corresponding variable. This type of NaN can be useful for initialization purposes
- C++11 proposes standard interface for creating different NaNs
- Rules for rounding
- Rules for $\frac{0}{0}, \frac{1}{-0}, \ldots$
Possible values are defined with
- base $b$
- accuracy $p$ - number of digits
- maximum possible value $e_{\max}$
and have the following restrictions
- $ 0 \leq c \leq b^p - 1$
- $1 - e_{\max} \leq q + p - 1 \leq e_{\max}$
The two most common format, single & double¶
The two most common formats, called binary32 and binary64 (called also single and double formats).
| Name | Common Name | Base | Digits | Emin | Emax |
|---|---|---|---|---|---|
| binary32 | single precision | 2 | 11 | -14 | + 15 |
| binary64 | double precision | 2 | 24 | -126 | + 127 |
Accuracy and memory¶
The relative accuracy of single precision is $10^{-7}-10^{-8}$,
while for double precision is $10^{-14}-10^{-16}$.
Crucial note 1: A float32 takes 4 bytes, float64, or double precision, takes 8 bytes.
Crucial note 2: These are the only two floating point-types supported in hardware.
Crucial note 3: You should use double precision in CSE and float on GPU/Data Science.
Division accuracy demo¶
import numpy as np
import random
#c = random.random()
#print(c)
c = np.float32(0.925924589693)
print(c)
a = np.float32(8.9)
b = np.float32(c / a)
print('{0:10.16f}'.format(b))
print(a * b - c)
Square root accuracy demo¶
#a = np.array(1.585858585887575775757575e-5, dtype=np.float)
a = np.float32(5.0)
b = np.sqrt(a)
print('{0:10.16f}'.format(b ** 2 - a))
Exponent accuracy demo¶
a = np.array(2.28827272710, dtype=np.float32)
b = np.exp(a)
print(np.log(b) - a)
Loss of significance¶
- Many operations lead to the loss of digits loss of significance
- For example, it is a bad idea to subtract two big numbers that are close, the difference will have fewer correct digits
- This is related to algorithms and their properties (forward/backward stability), which we will discuss later
Summation algorithm¶
However, the rounding errors can depend on the algorithm.
Consider the simplest problem: given $n$ floating point numbers $x_1, \ldots, x_n$
Compute their sum
$$S = \sum_{i=1}^n x_i = x_1 + \ldots + x_n.$$
The simplest algorithm is to add one-by-one
What is the actual error for such algorithm?
Naïve algorithm
Naïve algorithm adds numbers one-by-one:
$$y_1 = x_1, \quad y_2 = y_1 + x_2, \quad y_3 = y_2 + x_3, \ldots.$$
The worst-case error is then proportional to $\mathcal{O}(n)$, while mean-squared error is $\mathcal{O}(\sqrt{n})$.
The Kahan algorithm gives the worst-case error bound $\mathcal{O}(1)$ (i.e., independent of $n$).
Can you find the $\mathcal{O}(\log n)$ algorithm?
Kahan summation¶
The following algorithm gives $2 \varepsilon + \mathcal{O}(n \varepsilon^2)$ error, where $\varepsilon$ is the machine precision.
s = 0
c = 0
for i in range(len(x)):
y = x[i] - c
t = s + y
c = (t - s) - y
s = t
import math
from numba import jit
n = 10 ** 8
sm = 1e-10
x = np.ones(n, dtype=np.float32) * sm
x[0] = 1.0
true_sum = 1.0 + (n - 1)*sm
approx_sum = np.sum(x)
math_fsum = math.fsum(x)
@jit(nopython=True)
def dumb_sum(x):
s = np.float32(0.0)
for i in range(len(x)):
s = s + x[i]
return s
@jit(nopython=True)
def kahan_sum(x):
s = np.float32(0.0)
c = np.float32(0.0)
for i in range(len(x)):
y = x[i] - c
t = s + y
c = (t - s) - y
s = t
return s
k_sum = kahan_sum(x)
d_sum = dumb_sum(x)
print('Error in np sum: {0:3.1e}'.format(approx_sum - true_sum))
print('Error in Kahan sum: {0:3.1e}'.format(k_sum - true_sum))
print('Error in dumb sum: {0:3.1e}'.format(d_sum - true_sum))
print('Error in math fsum: {0:3.1e}'.format(math_fsum - true_sum))
More complicated example¶
import numpy as np
test_list = [1, 1e20, 1, -1e20]
print(math.fsum(test_list))
print(np.sum(test_list))
print(1 + 1e20 + 1 - 1e20)
Summary of floating-point¶
You should be really careful with floating point, since it may give you incorrect answers due to rounding-off errors.
For many standard algorithms, the stability is well-understood and problems can be easily detected.
Vectors¶
- In NLA we typically work not with numbers, but with vectors
- Recall that a vector in a fixed basis of size $n$ can be represented as a 1D array with $n$ numbers
- Typically, it is considered as an $n \times 1$ matrix (column vector)
Example: Polynomials with degree $\leq n$ form a linear space. Polynomial $ x^3 - 2x^2 + 1$ can be considered as a vector $\begin{bmatrix}1 \\ -2 \\ 0 \\ 1\end{bmatrix}$ in the basis $\{x^3, x^2, x, 1\}$
Vector norm¶
Vectors typically provide an (approximate) description of a physical (or some other) object
One of the main question is how accurate the approximation is (1%, 10%)
What is an acceptable representation, of course, depends on the particular applications. For example:
- In partial differential equations accuracies $10^{-5} - 10^{-10}$ are the typical case
- In data-based applications sometimes an error of $80\%$ is ok, since the interesting signal is corrupted by a huge noise
Distances and norms¶
- Norm is a qualitative measure of smallness of a vector and is typically denoted as $\Vert x \Vert$.
The norm should satisfy certain properties:
- $\Vert \alpha x \Vert = |\alpha| \Vert x \Vert$
- $\Vert x + y \Vert \leq \Vert x \Vert + \Vert y \Vert$ (triangle inequality)
- If $\Vert x \Vert = 0$ then $x = 0$
The distance between two vectors is then defined as
$$ d(x, y) = \Vert x - y \Vert. $$
Standard norms¶
The most well-known and widely used norm is euclidean norm:
$$\Vert x \Vert_2 = \sqrt{\sum_{i=1}^n |x_i|^2},$$
which corresponds to the distance in our real life. If the vectors have complex elements, we use their modulus.
$p$-norm¶
Euclidean norm, or $2$-norm, is a subclass of an important class of $p$-norms:
$$ \Vert x \Vert_p = \Big(\sum_{i=1}^n |x_i|^p\Big)^{1/p}. $$
There are two very important special cases:
- Infinity norm, or Chebyshev norm is defined as the maximal element:
$$ \Vert x \Vert_{\infty} = \max_i | x_i| $$
- $L_1$ norm (or Manhattan distance) which is defined as the sum of modules of the elements of $x$:
$$ \Vert x \Vert_1 = \sum_i |x_i| $$
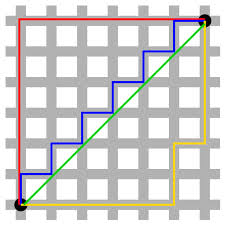
We will give examples where $L_1$ norm is very important: it all relates to the compressed sensing methods that emerged in the mid-00s as one of the most popular research topics.
Equivalence of the norms¶
All norms are equivalent in the sense that
$$ C_1 \Vert x \Vert_* \leq \Vert x \Vert_{**} \leq C_2 \Vert x \Vert_* $$
for some positive constants $C_1(n), C_2(n)$, $x \in \mathbb{R}^n$ for any pairs of norms $\Vert \cdot \Vert_*$ and $\Vert \cdot \Vert_{**}$. The equivalence of the norms basically means that if the vector is small in one norm, it is small in another norm. However, the constants can be large.
Computing norms in Python¶
The NumPy package has all you need for computing norms: np.linalg.norm function.
import numpy as np
n = 100
a = np.ones(n)
b = a + 1e-3 * np.random.randn(n)
print('Relative error in L1 norm:', np.linalg.norm(a - b, 1) / np.linalg.norm(b, 1))
print('Relative error in L2 norm:', np.linalg.norm(a - b) / np.linalg.norm(b))
print('Relative error in Chebyshev norm:', np.linalg.norm(a - b, np.inf) / np.linalg.norm(b, np.inf))
Unit disks in different norms¶
- A unit disk is a set of point such that $\Vert x \Vert \leq 1$
- For the euclidean norm a unit disk is a usual disk
- For other norms unit disks look very different
%matplotlib inline
import matplotlib.pyplot as plt
import numpy as np
p = 1 # Which norm do we use
M = 40000 # Number of sampling points
a = np.random.randn(M, 2)
b = []
for i in range(M):
if np.linalg.norm(a[i, :], p) <= 1:
b.append(a[i, :])
b = np.array(b)
plt.plot(b[:, 0], b[:, 1], '.')
plt.axis('equal')
plt.title('Unit disk in the p-th norm, $p={0:}$'.format(p))
plt.show()

Why $L_1$-norm can be important?¶
$L_1$ norm, as it was discovered quite recently, plays an important role in compressed sensing.
The simplest formulation of the considered problem is as follows:
- You have some observations $f$
- You have a linear model $Ax = f$, where $A$ is an $n \times m$ matrix, $A$ is known
- The number of equations, $n$, is less than the number of unknowns, $m$
The question: can we find the solution?
The solution is obviously non-unique, so a natural approach is to find the solution that is minimal in the certain sense:
\begin{align*} & \Vert x \Vert \rightarrow \min_x \\ \mbox{subject to } & Ax = f \end{align*}
Typical choice of $\Vert x \Vert = \Vert x \Vert_2$ leads to the linear least squares problem (and has been used for ages).
The choice $\Vert x \Vert = \Vert x \Vert_1$ leads to the compressed sensing
- It typically yields the sparsest solution
What is a stable algorithm?¶
And we finalize the lecture by the concept of stability.
- Let $x$ be an object (for example, a vector)
- Let $f(x)$ be the function (functional) you want to evaluate
You also have a numerical algorithm alg(x) that actually computes approximation to $f(x)$.
The algorithm is called forward stable, if $$\Vert alg(x) - f(x) \Vert \leq \varepsilon $$
The algorithm is called backward stable, if for any $x$ there is a close vector $x + \delta x$ such that
$$alg(x) = f(x + \delta x)$$
and $\Vert \delta x \Vert$ is small.
Classical example¶
A classical example is the solution of linear systems of equations using Gaussian elimination which is similar to LU factorization (more details later)
We consider the Hilbert matrix with the elements
$$A = \{a_{ij}\}, \quad a_{ij} = \frac{1}{i + j + 1}, \quad i,j = 0, \ldots, n-1.$$
And consider a linear system
$$Ax = f.$$
We will look into matrices in more details in the next lecture, and for linear systems in the upcoming weeks
import numpy as np
n = 500
a = [[1.0/(i + j + 1) for i in range(n)] for j in range(n)] # Hilbert matrix
A = np.array(a)
rhs = np.random.random(n)
sol = np.linalg.solve(A, rhs)
print(np.linalg.norm(A.dot(sol) - rhs)/np.linalg.norm(rhs))
#plt.plot(sol)
rhs = np.ones(n)
sol = np.linalg.solve(A, rhs)
print(np.linalg.norm(A.dot(sol) - rhs)/np.linalg.norm(rhs))
#plt.plot(sol)
More examples of instability¶
How to compute the following functions in numerically stable manner?
- $\log(1 - \tanh^2(x))$
- $SoftMax(x)_j = \dfrac{e^{x_j}}{\sum\limits_{i=1}^n e^{x_i}}$
u = 300
eps = 1e-6
print("Original function:", np.log(1 - np.tanh(u)**2))
eps_add = np.log(1 - np.tanh(u)**2 + eps)
print("Attempt imporove stability with add small constant:", eps_add)
print("Use more numerically stable form:", np.log(4) - 2 * np.log(np.exp(-u) + np.exp(u)))
n = 5
x = np.random.randn(n)
x[0] = 1000
print(np.exp(x) / np.sum(np.exp(x)))
print(np.exp(x - np.max(x)) / np.sum(np.exp(x - np.max(x))))
Take home message¶
- Floating point (double, single, number of bytes), rounding error
- Norms are measures of smallness, used to compute the accuracy
- $1$, $p$ and Euclidean norms
- $L_1$ is used in compressed sensing as a surrogate for sparsity (later lectures)
- Forward/backward error (and stability of algorithms) (later lectures)