Lecture 10: Randomized linear algebra¶
Brief recap of the previous lecture¶
SVD and algorithms for its computations: divide-and-conquer, QR, Jacobi, bisection.
Todays lecture¶
Today, we will do a brief dive into the randomized NLA.
A good read is (https://arxiv.org/pdf/2002.01387.pdf)
Random numbers¶
All the computations that we considered up to today were deterministic.
However, reduction of complexity can be done by using randomized (stochastic) computation.
Example: randomized matrix multiplication.
Freivalds algorithm¶
Checks by multiplying by random vectors!
Complexity is $k n^2$, probability is of failure is $\frac{1}{2^k}$.
Matrix multiplication¶
But can we multiply matrices faster using randomization ideas?
Randomized matrix multiplication¶
- We know that matrix multiplication $AB$ costs $O(mnp)$ for matrices $m \times p$ and $p \times n$
- We can construct approximation of this product by sampling rows and columns of the multipliers
Q: how to sample them?
A: generate probabilities from their norms!
- So the final approximation expression
where $A^{(i_t)}$ is a column of $A$ and $B_{(i_t)}$ is a row of $B$
- Complexity reduction from $O(mnp)$ to $O(mnk)$
import numpy as np
n = 1
p = 10000
m = 1
A = np.random.randn(n, p)
B = np.random.randn(p, m)
C = A @ A.T
def randomized_matmul(A, B, k):
p1 = A.shape[1]
p = np.linalg.norm(A, axis=0) * np.linalg.norm(B, axis=1)
p = p
p = p.ravel() / p.sum()
n = A.shape[1]
p = np.ones(p1)
p = p/p.sum()
idx = np.random.choice(np.arange(n), (k,), False, p)
#d = 1 / np.sqrt(k * p[idx])
d = 1.0/np.sqrt(k)#np.sqrt(p1)/np.sqrt(k*p[idx])
A_sketched = A[:, idx]*np.sqrt(p1)/np.sqrt(k)#* d[None, :]
B_sketched = B[idx, :]*np.sqrt(p1)/np.sqrt(k) #* d[:, None]
C = A_sketched @ B_sketched
print(d)
return C
def randomized_matmul_topk(A, B, K):
norm_mult = np.linalg.norm(A,axis=0) * np.linalg.norm(B,axis=1)
top_k_idx = np.sort(np.argsort(norm_mult)[::-1][:K])
A_top_k_cols = A[:, top_k_idx]
B_top_k_rows = B[top_k_idx, :]
C_approx = A_top_k_cols @ B_top_k_rows
return C_approx
num_items = 3000
C_appr_samples = randomized_matmul(A, B, num_items)
print(C_appr_samples, 'appr')
print(C, 'true')
C_appr_topk = randomized_matmul_topk(A, B, num_items)
print(np.linalg.norm(C_appr_topk - C, 2) / np.linalg.norm(C, 2))
print(np.linalg.norm(C_appr_samples - C, 2) / np.linalg.norm(C, 2))
0.018257418583505537 [[-209.68265641]] appr [[10065.73675927]] true 1.012091041179466 1.020831327246555
Approximation error¶
$$ \mathbb{E} [\|AB - CR\|^2_F] = \frac{1}{k} \left(\sum_{i=1}^n \| A^{(i)} \|_2 \| B_{(i)} \|_2\right)^2 - \frac{1}{k}\|AB\|_F^2 $$- Other sampling probabilities are possible
Use approximation $$ AB \approx ASD(SD)^\top B = ACC^{\top}B$$ can replace sampling and scaling with another matrix that
- reduces the dimension
- sufficiently accurately approximates
Q: what matrices can be used?
Stochastic trace estimator¶
Many problems can be written in the form of the trace estimation:
$$\mathrm{Tr}(A) = \sum_{i} A_{ii}.$$Can we compute the trace of the matrix if we only have access to matrix-by-vector products?
Two estimators¶
The randomized trace estimators can be computed from the following formula:
$$\mathrm{Tr}(A) = E_w w^* A w, \quad E ww^* = 1$$In order to sample, we pick $k$ independent samples of $w_k$, get random variable $X_k$ and average the results.
Girard trace estimator: Sample $w \sim N(0, 1)$
Then, $\mathrm{Var} X_k = \frac{2}{k} \sum_{i, j=1}^n \vert A_{ij} \vert^2 = \frac{2}{k} \Vert A \Vert^2_F$
Hutchinson trace estimator: Let $w$ be a Rademacher random vector (i.e., elements are sampled from the uniform distribution.
It gives the minimal variance estimator.
Intdim¶
The variance of the trace can be estimated in terms of intrinsic dimension (intdim) for symmetric positive definite matrices.
It is defined as $\mathrm{intdim}(A) = \frac{\mathrm{Tr}(A)}{\Vert A \Vert_F}$. It is easy to show that
$$1 \leq \mathrm{intdim}(A) \leq r.$$Then, the probability of the large deviation can be estimated as
$$P( \vert \overline{X}_k - \mathrm{Tr}(A) \vert \geq t \mathrm{Tr}(A)) \leq \frac{2}{k \mathrm{intdim}(A) t^2}$$Better bounds for SPD matrices¶
If $A$ is SPD, then
$$P(\overline{X}_k \geq \tau \mathrm{Tr}(A) ) \leq \exp\left(-1/2 \mathrm{intdim}(A) (\sqrt{\tau} - 1)^2)\right) $$Similar inequality holds for the lower bound.
This estimate is much better.
An interesting (and often mislooked) property of stochastic estimator is that it comes with a stochastic variance estimate (from samples!)
Warning: we still need $\varepsilon^{-2}$ samples to get to the accuracy $\varepsilon$ when using independent samples.
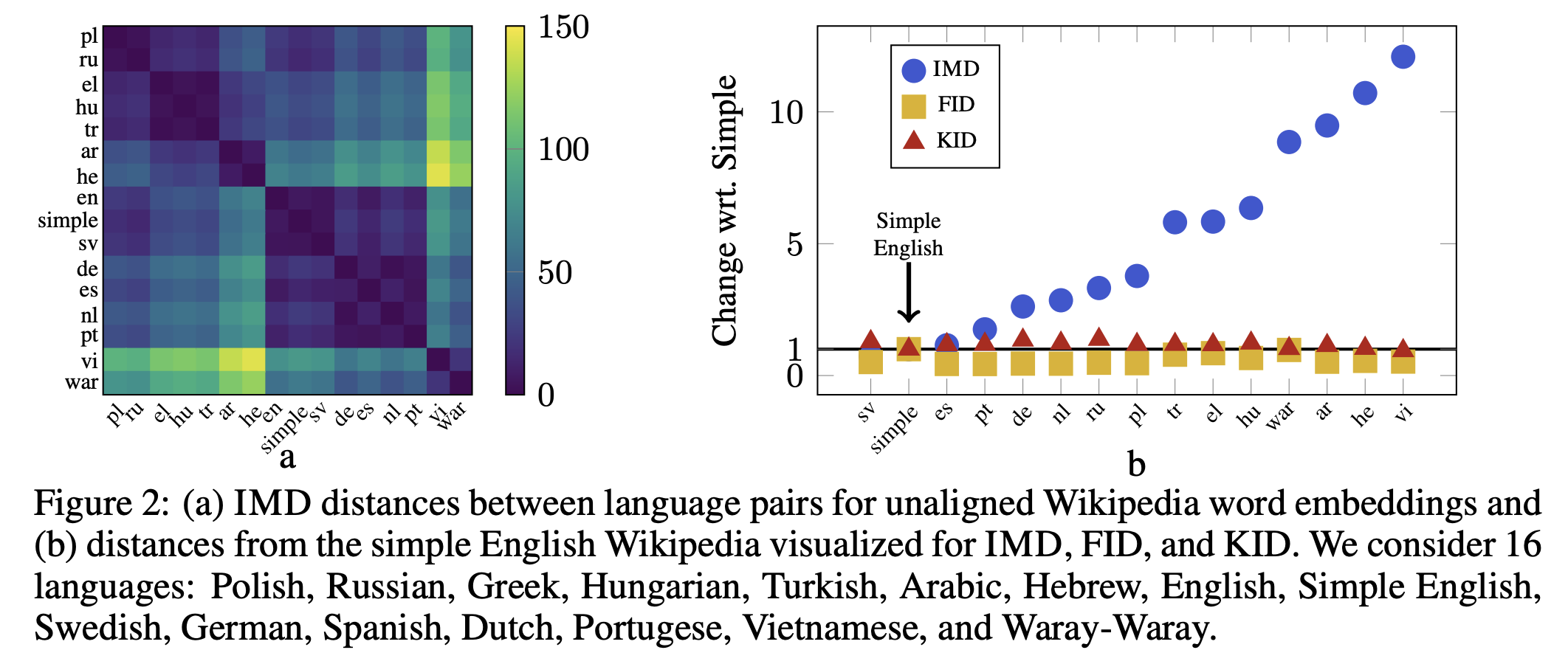
Distances between languages (original paper)¶
Where do stochastic methods also help?¶
- SVD
- Linear systems
Randomized SVD (Halko et al, 2011)¶
- Problem statement reminder
where $A$ is of size $m \times n$, $U$ is of size $m \times k$ and $V$ is of size $n \times k$.
- We have already known that the complexity of rank-$k$ approximation is $O(mnk)$
- How can we reduce this complexity?
- Assume we know orthogonal matrix $Q$ of size $m \times k$ such that
- In other words, columns of $Q$ represent orthogonal basis in the column space of matrix $A$
Then the following deterministic steps can give the factors $U$, $\Sigma$ and $V$ corresponding of SVD of matrix $A$
- Form $k \times n$ matrix $B = Q^{\top}A$
- Compute SVD of small matrix $B = \hat{U}\Sigma V^{\top}$
- Update left singular vectors $U = Q\hat{U}$
If $k \ll \min(m, n)$ then these steps can be performed fast
- If $Q$ forms exact basis in column space of $A$, then $U$, $\Sigma$ and $V$ are also exact!
- So, how to compose matrix $Q$?
Randomized approximation of basis in column space of $A$¶
- The main approach
- Generate $k + p$ Gaussian vectors of size $m$ and form matrix $G$
- Compute $Y = AG$
- Compute QR decomposition of $Y$ and use the resulting matrix $Q$ as an approximation of the basis
- Parameter $p$ is called oversampling parameter and is needed to improve approximation of the leading $k$ left singular vectors later
- Computing of $Y$ can be done in parallel
- Here we need only matvec function for matrix $A$ rather than its elements as a 2D array - black-box concept!
- Instead of Gaussian random matrix one can use more structured but still random matrix that can be multiplied by $A$ fast
import matplotlib.pyplot as plt
import numpy as np
n = 1000
k = 100
m = 200
# Lowrank matrix
A = np.random.randn(n, k)
B = np.random.randn(k, m)
A = A @ B
# Random matrix
# A = np.random.randn(n, m)
def randomized_svd(A, rank, p):
m, n = A.shape
G = np.random.randn(n, rank + p)
Y = A @ G
Q, _ = np.linalg.qr(Y)
B = Q.T @ A
u, S, V = np.linalg.svd(B)
U = Q @ u
return U, S, V
rank = 100
p = 20
U, S, V = randomized_svd(A, rank, p)
print("Error from randomized SVD", np.linalg.norm(A - U[:, :rank] * S[None, :rank] @ V[:rank, :]))
plt.semilogy(S[:rank] / S[0], label="Random SVD")
u, s, v = np.linalg.svd(A)
print("Error from exact SVD", np.linalg.norm(A - u[:, :rank] * s[None, :rank] @ v[:rank, :]))
plt.semilogy(s[:rank] / s[0], label="Exact SVD")
plt.legend(fontsize=18)
plt.xticks(fontsize=16)
plt.yticks(fontsize=16)
plt.ylabel("$\sigma_i / \sigma_0$", fontsize=16)
_ = plt.xlabel("Index of singular value", fontsize=16)
Error from randomized SVD 1.4025109617270866e-11 Error from exact SVD 1.236565947080769e-11

import scipy.sparse.linalg as spsplin
# More details about Facebook package for computing randomized SVD is here: https://research.fb.com/blog/2014/09/fast-randomized-svd/
import fbpca
n = 1000
m = 200
A = np.random.randn(n, m)
k = 10
p = 10
%timeit spsplin.svds(A, k=k)
%timeit randomized_svd(A, k, p)
%timeit fbpca.pca(A, k=k, raw=False)
59.7 ms ± 6.14 ms per loop (mean ± std. dev. of 7 runs, 10 loops each) 18.7 ms ± 2.69 ms per loop (mean ± std. dev. of 7 runs, 10 loops each) 15.5 ms ± 2.46 ms per loop (mean ± std. dev. of 7 runs, 100 loops each)
Convergence theorem¶
The averaged error of the presented algorithm, where $k$ is target rank and $p$ is oversampling parameter, is the following
- in Frobenius norm
- in spectral norm
The expectation is taken w.r.t. random matrix $G$ generated in the method described above.
Compare these upper bounds with Eckart-Young theorem. Are these bounds good?
Accuracy enhanced randomized SVD¶
- Main idea: power iteration
- If $A = U \Sigma V^\top$, then $A^{(q)} = (AA^{\top})^qA = U \Sigma^{2q+1}V^\top $, where $q$ some small natural number, e.g. 1 or 2
- Then we sample from $A^{(q)}$, not from $A$
- The main reason: if singular values of $A$ decays slowly, the singular values of $A^{(q)}$ will decay faster
n = 1000
m = 200
A = np.random.randn(n, m)
s = np.linalg.svd(A, compute_uv=False)
Aq = A @ A.T @ A
sq = np.linalg.svd(Aq, compute_uv=False)
plt.semilogy(s / s[0], label="$A$")
plt.semilogy(sq / sq[0], label="$A^{(1)}$")
plt.legend(fontsize=18)
plt.xticks(fontsize=16)
plt.yticks(fontsize=16)
plt.ylabel("$\sigma_i / \sigma_0$", fontsize=16)
_ = plt.xlabel("Index of singular value", fontsize=16)

Loss of accuracy with rounding errors¶
- Compose $A^{(q)}$ naively leads to condition number grows and loss of accuracy
Q: how can we battle with this issue?
A: sequential orthogonalization!
def more_accurate_randomized_svd(A, rank, p, q):
m, n = A.shape
G = np.random.randn(n, rank + p)
Y = A @ G
Q, _ = np.linalg.qr(Y)
for i in range(q):
W = A.T @ Q
W, _ = np.linalg.qr(W)
Q = A @ W
Q, _ = np.linalg.qr(Q)
B = Q.T @ A
u, S, V = np.linalg.svd(B)
U = Q @ u
return U, S, V
n = 1000
m = 200
A = np.random.randn(n, m)
rank = 100
p = 20
U, S, V = randomized_svd(A, rank, p)
print("Error from randomized SVD", np.linalg.norm(A - U[:, :rank] * S[None, :rank] @ V[:rank, :]))
plt.semilogy(S[:rank] / S[0], label="Random SVD")
Uq, Sq, Vq = more_accurate_randomized_svd(A, rank, p, 5)
print("Error from more accurate randomized SVD", np.linalg.norm(A - Uq[:, :rank] * Sq[None, :rank] @ Vq[:rank, :]))
plt.semilogy(Sq[:rank] / Sq[0], label="Accurate random SVD")
u, s, v = np.linalg.svd(A)
print("Error from exact SVD", np.linalg.norm(A - u[:, :rank] * s[None, :rank] @ v[:rank, :]))
plt.semilogy(s[:rank] / s[0], label="Exact SVD")
plt.legend(fontsize=18)
plt.xticks(fontsize=16)
plt.yticks(fontsize=16)
plt.ylabel("$\sigma_i / \sigma_0$", fontsize=16)
_ = plt.xlabel("Index of singular value", fontsize=16)
Error from randomized SVD 288.1455342798038 Error from more accurate randomized SVD 251.3959267962541 Error from exact SVD 250.50337524965528

%timeit spsplin.svds(A, k=k)
%timeit fbpca.pca(A, k=k, raw=False)
%timeit randomized_svd(A, k, p)
%timeit more_accurate_randomized_svd(A, k, p, 1)
%timeit more_accurate_randomized_svd(A, k, p, 2)
%timeit more_accurate_randomized_svd(A, k, p, 5)
58.9 ms ± 3.99 ms per loop (mean ± std. dev. of 7 runs, 10 loops each) 18.6 ms ± 1.17 ms per loop (mean ± std. dev. of 7 runs, 100 loops each) 27.9 ms ± 3.39 ms per loop (mean ± std. dev. of 7 runs, 10 loops each) 46 ms ± 6.25 ms per loop (mean ± std. dev. of 7 runs, 10 loops each) 76.2 ms ± 14.9 ms per loop (mean ± std. dev. of 7 runs, 10 loops each) 133 ms ± 19.2 ms per loop (mean ± std. dev. of 7 runs, 10 loops each)
Convergence theorem¶
The presented above method provides the following upper bound
$$ \mathbb{E}\|A - QQ^{\top}A \|_2 \leq \left[\left( 1 + \sqrt{\frac{k}{p-1}} \right)\sigma^{2q+1}_{k+1} + \frac{e\sqrt{k+p}}{p}\left( \sum_{j=k+1}^{\min(m, n)} \sigma^{2(2q+1)}_j \right)^{1/2}\right]^{1/(2q+1)} $$Consider the worst case, where no lowrank structure exists in the given matrix.
Q: what is the degree of suboptimality w.r.t. Eckart-Young theorem?
Summary on randomized SVD¶
- Efficient method to get approximate SVD
- Simple to implement
- It can be extended to one-pass method, where matrix $A$ is needed only to construct $Q$
- It requires only matvec with target matrix
Kaczmarz method to solve linear systems¶
- We have already discussed how to solve overdetermined linear systems $Ax = f$ in the least-squares manner
- pseudoinverse matrix
- QR decomposition
- One more approach is based on iterative projections a.k.a. Kaczmarz method or algebraic reconstruction technique in compoutational tomography domain
- Instead of solving all equations, pick one randomly, which reads
and given an approximation $x_k$ try to find $x_{k+1}$ as
$$x_{k+1} = \arg \min_x \frac12 \Vert x - x_k \Vert^2_2, \quad \mbox{s.t.} \quad a^{\top}_i x = f_i.$$- A simple analysis gives
- A cheap update, but the analysis is quite complicated.
- You can recognize in this method stochastic gradient descent with specific step size equal to $\frac{1}{\|a_i\|_2^2}$ for every sample
Convergence theorem¶
- Assume we generate $i$ according to the distribution over the all available indices proportional to norms of the rows, i.e. $\mathbb{P}[i = k] = \frac{\|a_k\|_2^2}{\| A \|^2_F}$. This method is called Randomized Kaczmarz method (RKM)
- Why sampling strategy is important here?
- Investigation of the best sampling is provided here
- If the overdetermined linear system is consistent, then
where $\kappa_F(A) = \frac{\| A \|_F}{\sigma_{\min}(A)}$ and $\sigma_{\min}(A)$ is a minimal non-zero singular value of $A$. This result was presented in (Strohmer and Vershynin, 2009)
- If the overdetermined linear system is inconsistent, then
where $r^* = Ax^* - f$
Inconsistent overdetermined linear system¶
- It was shown in (Needell, 2010) that RKM does not converge to $A^{\dagger}f$
- To address this issue Randomized extended Kaczmarz method was proposed in (A Zouzias, N Freris, 2013)
The main idea is to use two steps of RKM:
the first step is for system $A^\top z = 0$ starting from $z_k$
$$ z^{k+1} = z^{k} - \frac{a^\top_{:, j} z^k}{\| a_{:, j} \|_2^2}a_{:, j} $$
the second step is for system $Ax = f - z_{k+1}$ starting from $x_k$
$$x^{k+1} = x^k - \frac{a_{i,:}x_k - f_i + z^{k+1}_i}{\|a_{i,:}\|_2^2}a^{\top}_{i,:} $$
Here $a_{:, j}$ denotes the $j$-th column of $A$ and $a_{i, :}$ denotes the $i$-th row of $A$
- If $z^0 \in f + \mathrm{range}(A)$ and $x^0 \in \mathrm{range}(A^\top)$, then REK converges exponentially to $A^{\dagger}f$
Sampling and sketching¶
- Sampling of a particular row can be considered as a particular case of more general approach called sketching
- Idea: replace matrix $A$ with another matrix $SA$, where matrix $SA$ has significantly smaller number of rows but preserves some important properties of matrix $A$
- Possible choices:
- random projection
- random row selection
- Example: linear least squares problem $\|Ax - b\|_2^2 \to \min_x$ transforms to $\| (SA)y - Sb \|_2^2 \to \min_y$ and we expect that $x \approx y$
- Blendenpick solver is based on that idea and outperforms LAPACK routine
- More details see in Sketching as a Tool for Numerical Linear Algebra by D. Woodruff
Coherence¶
The key idea is the coherence of the matrix.
Let $A$ be $n \times r$ and $U$ be an orthogonal matrix whose columns form the basis of the column space of $A$.
Then, coherence is defined as
$$\mu(A) = \max \Vert U_{i, *} \Vert^2$$Coherence is always smaller than $1$ and bigger than $\frac{r}{n}$, it has nothing to do with the condition number.
What does it mean?
Coherence¶
Small coherence means, that sampling rows uniformly gives a good preconditioner (will be covered later in the course, and why it is important)
One can do $S A = QR$, and look at the condition number of $AR^{-1}$.
Summary on randomized methods in solving linear systems¶
- Easy to use family of methods
- Especially useful in problems with streaming data
- Existing theoretical bounds for convergence
- Many interpretations in different domains (SGD in deep learning, ART in computational tomography)
Summary on randomized matmul¶
- Simple method to get approximation of result
- Can be used if the high accuracy is not crucial
- Especially useful for large dense matrices
Next lecture¶
- We start sparse and/or structured NLA.